实现自动驾驶与无人机应用 高精度GNSS技术不可或缺


完全自动驾驶的实现须依赖多项技术的同步成熟与就绪,而平价、可扩充,以及可靠的高精准度定位技术便是其中的重要一环。过去数十年来,全球导航卫星系统(GNSS)的效能已获得显著提升,在2000年初,首次准确定位的时间大约需要30秒到数分钟,从2005年开始,接收器灵敏度大幅改善,从-130dBm提升到-167dBm。
到了2015年,功能定位卫星星系的数量已从2000年的一个全球星系(美国的GPS)增加到四个(GPS、俄罗斯的GLONASS,中国的北斗,以及欧洲的伽利略),并有两个区域系统(印度的NAVIC和日本的QZSS)可为互补。这为多星系GNSS接收器开启了新的机会。
此外,卫星讯号也经过现代化改造,到2018年,多频GNSS变得更为平价,这些进展已为GNSS的下一个目标奠定了基础,也就是实现公寸(10公分)或公分级的精准度。
GNSS接收器是利用它们与至少四个GNSS卫星的距离进行三角测量来取得位置,因为接收器是根据卫星讯号到达它们所需的时间来测量距离,因此即使是最轻微的误差,低至几十亿分之一秒,都会对准确度带来负面影响,卫星轨道位置的误差会导致约2.5公尺的准确度差距。
卫星时脉误差也可能增加额外1.5公尺差距。而对流层和电离层的扰动可能会再分别增加1公尺和5公尺差距;如果卫星接近地平线或在太阳活动强烈时期,准确度差距还会再增加。
截至目前为止,最大的误差是由多径(Multipath)效应所引起,这是指卫星讯号会借由多个或间接轨迹到达接收器,例如在都会区,卫星讯号会被建筑物外墙反弹。在空旷的户外,标准精准度的GNSS接收器则可准确到2公尺以内。
利用GNSS校正数据来消除GNSS误差,高精准度GNSS系统可大幅提高其精准度。取得此数据的方式是从已知位置的基地台来监控GNSS讯号。测得与基地台位置的偏差值后再将其传送给漫游器(Rover);这是配备了GNSS接收器的有人或无人载具,便能获取更准确的位置资讯。在适当条件下,只要基地台和漫游器相隔不是太远,此方法可达到公分级的准确度。
然而,并不是所有的GNSS误差都可以用此方法来消除。由于到达基地台的卫星讯号会受到许多与到达漫游器相同的误差,因此校正数据除了可用来消除卫星位置和时脉误差之外,亦可消除大气误差。但是,漫游器周遭环境所引起的多径误差,例如由邻近高楼大厦造成的,就必须透过接收器本身来解决。
高精准度GNSS并不是新概念,此技术已被测量人员和其他专业人员使用了数十年之久。但是,高昂的装置成本和昂贵的校正服务费用将这项技术限制在专业利基市场,无法扩展到其他市场。
不过,现在拥有的技术可以使高准精度GNSS对大众市场更具吸引力,进一步实现包括车道准确导航、扩增实境(Augmented Reality)、无人机精准飞行和着陆、无人割草机和拖拉机,以及V2X通讯等应用的发展。其中,V2X可以使联网汽车与其他车辆和基础建设无线通讯,以避免碰撞,且随着技术的进展,更多的应用可望一一浮现。
扩展高精准度定位技术以支援大众市场
校正服务供应商可透过两种方式把GNSS误差数据传送给漫游器,其中只有一种可以扩展至满足大众市场的需求。在基于观测空间再现(Ozservation Space Representation, OSR)的方法中,校正服务供应商会计算每个漫游器位置的预期观测误差值,并将这些讯息无线传送给它们。
相反地,在基于状态空间再现(State Space Representation, SSR)的方法中(图1),观测到的GNSS讯号误差会被用来为整个区域的误差进行物理建模,以做为状态空间模型。然后,在任何给定时间用来描述状态空间模型的参数会被广播到整个建模区域中的漫游器。
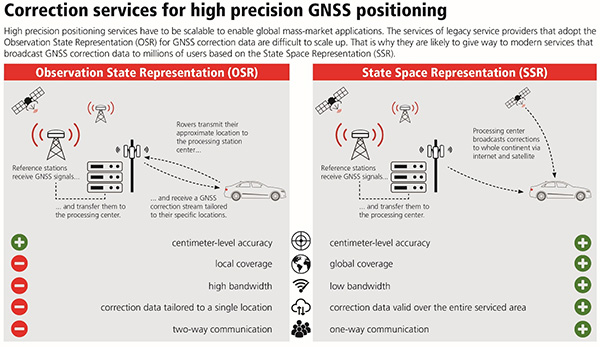
图1 观测空间再现(OSR)与状态空间再现(SSR)的比较
高精准度定位服务必须能被扩展,以支援全球性的大众市场应用。采用OSR来进行GNSS校正数据的原有服务供应商将难以扩展,这也是为什么把GNSS校正数据广播给数百万个使用者的SSR新型服务将会取而代之的原因。
OSR已被即时动态定位(RTK)和网路RTK卫星导航采用,在现今需要公分级或甚至公厘级定位准确度的设置中使用。当基地台和漫游器相距30公里以内时,这些方法是准确的。基于OSR的方法需要漫游器和校正服务供应商之间的双向通讯,由于行动通讯网路很难可靠地维持这种通讯级别,使其很难适用于大众市场的应用。基于SSR的方法则是透过向整个服务区域中的所有漫游器广播单一的校正数据流来解决这个问题。这种简化的通讯方式,以及可以在相对较低的基地台密度(150~250公里)下提供稳健的服务,使其成为大众市场应用(如高度辅助驾驶)的唯一可行方法。
先进的接收器能够接收到更多来自卫星的讯息,使其效能获得进一步的提升。虽然第一代GNSS卫星仅能在单一频段内传输讯号,但现在的导航卫星系统能以多达三个独立的频段发送讯号。例如,美国的GPS系统以L1、L2和L5频段发射,分别集中在1575MHz、1227MHz和1176 MHz。俄罗斯的GLONASS只在L1和L2频段传输,中国的北斗也是如此。
总结来说,高精准度GNSS接收器可以利用单个星系中的多个频段,以大幅缩短实现高精准度所需的时间。于是,定位效能更为稳健,而且最终能为使用者带来更可靠的服务。
未来的高精准度GNSS系统将由多个单元组成,目前在轨道上的GNSS星系是其中最主要的单元。在地面上,GNSS参考基地台负责即时监测GNSS讯号误差。采用SSR方法后,校正服务将透过网际网路以及同步卫星广播误差值。除了采用双频GNSS接收器外,漫游器还将配备蜂巢式数据机,以接收透过网际网路广播的校正数据流,并利用L频段接收器来接收卫星的校正数据流(图2)。

图2 具备SSR校正数据的单频GNSS和双频GNSS效能比较
无人驾驶兴起 高精准度定位技术成关键
虽然现今的车队仍由须要依赖驾驶控制的车辆所组成,但已有越来越多的车辆会提供一些辅助驾驶功能。在迈向完全自主驾驶发展的过程中,须逐步提高特殊使用案例的自动化程度,例如在高速公路上行驶或自动停车功能。
今天,驾驶可能会受益于某些辅助驾驶功能(图3),但他们仍须执行车道保持和车道变换等所有的操作。现今,路上已有一些具备2级自动化能力的汽车,它们配备了部分自动化的系统,能在特殊的应用场合自主地执行这些动作。在高度自动驾驶(3级)中,驾驶可在特殊的应用案例中把手离开方向盘,但必须随时准备在必要时接管。全自动驾驶(4级)不再需要驾驶,但仅针对特殊的使用案例,只有当完全通过这些级别,我们才能把无人自主驾驶车辆扩展到所有的使用案例(5级)。

图3 无人自主驾驶的发展蓝图
为了满足无人驾驶的安全需求,各种技术的结合是必要的。把摄影机影像、光达和雷达数据以及高画质地图结合在一起,已经可以让车辆以高准确度(大约10公分)将其定位在地图上,并在许多条件下检测障碍物,然而,光是利用这些系统,它的安全性还不足以实现无人驾驶。
在朝全自动驾驶过渡期间,车辆的精确位置将决定是否可以开启自动驾驶模式。恶劣的环境条件或缺乏明显的地标可能会导致光学系统无法正确决定使用案例,对4级系统来说,这深具挑战性,因为在4级自动化程度中,驾驶可以在某些情况下完全放手对车辆的控制。
正是在这种情况下,高精准度GNSS与汽车惯性导航的结合,亦即把卫星导航数据与各别的车轮速度、陀螺仪和加速度计讯息相结合,以便在没有GNSS讯号的情况下提供准确定位,能介入做为完全独立的位置来源。其提供的精确位置资讯不仅有助于辨识高画质地图和地理围栏关键区域的正确部分,如须降低速度,还可用来校准车辆的感测器。只有采用这样的系统,才能满足ISO 26262标准中所制定的自主车辆安全要求,这些安全要求包括功能安全性、车辆能安全回应错误的能力,无论是在韧体或硬体层级,都须确保乘客安全。
功能安全性是安全自动驾驶的先决条件。然而,这样还不够,功能安全性是以车辆为中心,它只处理车辆可能发生的错误。对于定位,主要的错误来源,像是卫星时脉和位置、多径效应或校正数据流中的潜在失误,都发生在车辆外部。
因此,即使是具备功能安全性的车辆也无法拒绝有缺陷的数据。考量这些外部的错误数据需要更全面性的作法,可称之为“完整性”。与功能安全性相反,完整性将从整体角度处理整个技术链,包括所有层面的各种感测器、V2X基础架构,以及安全系统。它要求所有技术,包括全球导航卫星系统,都能对其输出的数据提供一定程度的信心,才能在该使用替代技术时提出警告。
为了提高道路安全,高精准度GNSS是实现先进驾驶辅助系统(ADAS)和完全无人驾驶的关键。做为定位讯息的独立来源,高精准度GNSS使用多频带接收器和SSR校正数据,将能在各种情况下可靠地提供车辆的确切位置。最终,它必须准确到能在高速公路上实现公寸等级,并在更具挑战性的城市高速道路上达到公尺以下等级,以确保回报的位置不仅准确,而且具有极高准确率。此外,为了要获得市场的大量采用,它还必须在品质上无可挑剔、而且价格合理。
为了实现把高精准度GNSS带到大众市场的目标,通讯模组业者近年来展开了多项行动,像是u-blox推出即时动态定位(RTK)接收器NEO-M8P,正式跨入高精准度GNSS市场;宣布与博世(Bosch)、三菱电机和Geo++合资的Sapcorda公司推出符合平价的GNSS校正服务;发布新款u-blox F9技术平台,可为工业和汽车应用提供多用途的高精准度定位技术,以及推出首款整合RTK技术的多频GNSS模组 ZED-F9P。
(本文作者为u-blox定位产品中心产品策略资深总监)

 专利申请
专利申请
 知识产权质押融资
知识产权质押融资
 专利地图分析
专利地图分析
 版权登记
版权登记
 集成电路布图设计
集成电路布图设计
 商标交易
商标交易
 商标申请
商标申请
 专利交易
专利交易
 专利无效
专利无效

A股36家半导体企业发起并购重组 新一轮产业整合风口已至



热门评论