


除了特斯拉以外,L4级自动驾驶是近来汽车界最热的一个名词。整车厂在宣布L4级的量产计划,芯片企业竞相发布L4级的解决方案,各地也纷纷开启L4级交通工具的试运营。
有人认为2021将是L4级自动驾驶的元年,有人则认为这不过是厂商宣传的噱头。在信心和质疑的交织下,L4级自动驾驶的落地似乎扑朔迷离。
跨级L3 直奔L4
自动驾驶的级别是由美国汽车工程师学会(SAE)所划定的,按照人工介入的程度,划分了6个等级。
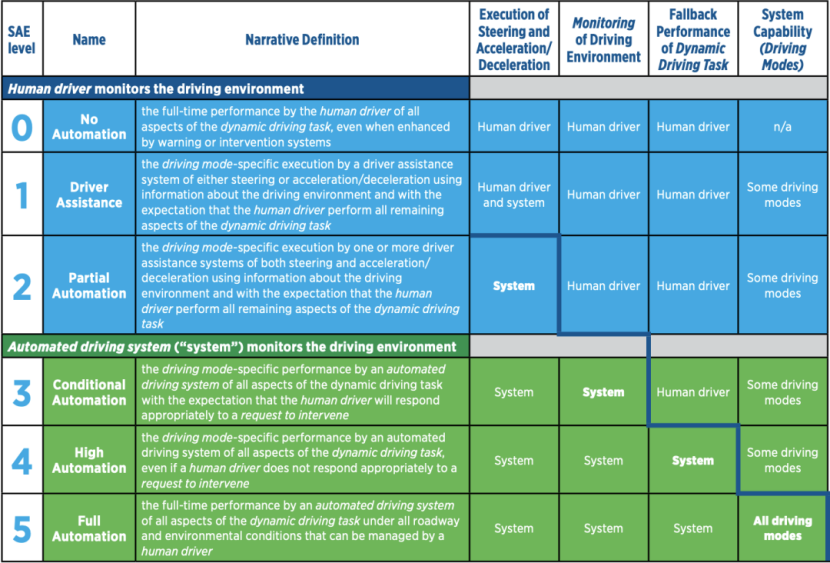
图 自动驾驶等级划分
业界目前的焦点在L3和L4级之上。这两级之间的关键区别就在于,如果发生意外或系统失效,具备L4 级自动驾驶功能的汽车可以进行干预。
L3级自动驾驶汽车也具有“环境检测”能力,可以自己根据信息做出决定,如进行超车。但是这个级别仍然需要人类操控。驾驶员必须保持警觉,并且在系统无法执行任务时进行操控。
这种定位就让L3处在非常尴尬的境地。当年奥迪为A8的L3级自动驾驶做了铺天盖地的宣传,最后却因为各种束缚而不了了之。
“我们放弃驾驶辅助技术的过渡阶段,决定直接提供L4级别全自动驾驶的车辆。原因是不知道在L3级别,如何从机械操控切换到人工操控。” 2016年8月,当时的福特北美总裁的Raj Nair曾这样表示。
比起级别更高的L4级,L3级依然需要人工的介入,但是始终需要驾驶员保持高度的专注,以便随时接管驾驶权,如果驾驶员出现误判,极有可能造成重大事故。
这就引发了一个非常重要的责任划分问题。在 L3 级自动驾驶下,如果车辆发生事故,责任将由技术提供方也就是主机厂和驾驶员共同承担,而 L2 级则全部由人类驾驶员来承担。这也让众车企背负着巨大压力。可为了展示实力,车企只能想出一个L2.5级的说法,以期规避责任划分风险。
于是,跳过鸡肋的L3,直奔高大上的L4也就成了车企默认的选择。只不过,这个步子迈的有点大。
在2020年11月9日发布的《智能网联汽车技术路线图2.0》中,中国智能网联汽车创新中心给出的自动驾驶车型量产时间表是:到2030年,实现高度自动驾驶技术(L4)的规模化应用。
以10年时间实现L4量产似乎比较合理,但是厂商们有点等不及了。去年,长安汽车提出了要在2022年实现量产,北汽给出的时间点则是2025年,长城汽车也发布了咖啡智驾“331”战略,提出在2023年实现L4级自动驾驶。进入2021年,4月16日,威马汽车发布了威马W6,宣称“于行业率先实现了L4级别无人驾驶”。仅隔一天,华为与ARCFOX联合打造的阿尔法S就开启了预售,这款车型搭载了华为ADS高阶自动驾驶全栈解决方案。按照官方的说法,华为的这套方案以L4级自动驾驶架构为基础,构筑面向L4~L2+级自动驾驶。
为了抢占市场份额,并在以后的标准制定中占据有利地形,车企的明争暗斗可见一斑。
激光雷达之外
现在业界说法是,要落地L4级自动驾驶,就看激光雷达。
以阿尔法S华为HI版为例,这款车型就使用了3个激光雷达、13个摄像头、6个毫米波雷达和12个超声波雷达。
尽管存在视觉算法和激光雷达的路线之争,但是除特斯拉以外的车企还是选择了激光雷达。因为激光雷达可以生成车辆周边环境的3D模型,为系统提供深度的环境数据,而且其在车辆定位中也扮演着重要的角色。
据行业人士介绍,实现L4自动驾驶的硬件设备一般要包含:6~12台摄像头、3~12台毫米波雷达、5台以内的激光雷达以及1~2台GNSS/IMU和1~2台计算平台(不同方案会选择不同侧重的传感器)。这一套设备成本高昂,基本在50万元左右。
但车企认为,这些成本问题可能随着大规模的应用逐步降低。相关调研机构就指出,当前可量产激光雷达的平均价格约为$1,000,到L4/L5导入千万台量产时单台激光雷达成本将降至$100以内。
不过,L4的挑战绝不止激光雷达一个。对于L4级自动驾驶的关键点:现有算法无法准确处理复杂环境下无限可能的长尾场景,激光雷达再强大也是不够的。这个时候,高精度地图的作用就体现出来了。
高精度地图相比于普通导航电子地图具有高精度、高动态、多维度的特点。高精度即精度达到厘米级别;高动态是指高精度地图数据的实时性,未来应对各类突发状况,自动驾驶车辆需要高精度地图的数据具有较好的实时性;多维度则是指地图中不仅包含有详细的车道模型、道路部件信息,还包括与交通安全相关的一些道路属性信息,如GPS 信号消失的区域、道路施工状态等。
因为很多信息都涉及国家安全,像高精度地图中的核心数据——如道路曲率——是不能公开的。所以要让高精度地图商用,就需要国家来牵头,而也会同样制约L4落地的进程。
聪明的厂商们也想出了各种办法,比如,华为的ADS在有高精地图的区域,可使用点对点自动驾驶功能;无高精地图的区域,可使用普通的L2级自动驾驶功能,只是这样就离完全意义上的L4相距甚远了。
此外,车路协同也是实现L4的一个重要因素。通过智慧交通和V2X车路云协同技术可以分担大量的路况感知和数据运算。通过路侧辅助系统,降低车载自动驾驶系统的投入成本。通过在信号灯、路灯等路侧设施上安装路侧计算单元(RSCU),5G传输低延时信号,实时分担车载计算。这些听着都很美妙,只不过实现的难度远超车端。
有人就总结了自动驾驶在在路测主要面对的四种挑战:封闭测试场地利用效率不高,智能路网建设市场热、政府冷,车联网标准尚不统一,尚未形成统一的标准化测试评价体系。逐一解决这些问题,绝非两三年能够实现。
如何挣钱

要让L4级自动驾驶能够落地,挣不挣钱才最关键。
一位汽车供应链人士表示:“商业模式的落地取决于闭环的形成。自动驾驶也有自己的供应链,这个链条中的关键供应商有一家不挣钱,一个细分行业不挣钱,闭环就无法形成,落地自然成为空谈。”
因为缺乏立法和基础设施,L4级无人驾驶汽车当前只能在限定区域行驶,这被称之为地理围栏(geofencing)。因此,现有的L4自动驾驶的商业模式非常有限。
有人将L4自动驾驶近期可实现的商业场景分为泊车系统(低速)的AVP(自动泊车)和中速的Robotaxi(自动出租车)/Robotruck(自动卡车)。
AVP由于车速较低,且使用场景不在公共道路上(不属于交警管理范围),需求的控制器算力要求不高(1.5-16Tops),需求的传感器也是基于现有的传感器,在2020年底、2021年初量产,后续会逐渐迭代完善功能,也包括控制器算力的提升。
AVP的商业模式也比较清晰:科技公司可通过出售AVP解决方案或C端收取运营费盈利,车企可从通过装载AVP系统吸引用户提高售价,停车场可通过场地改造及运营增加停车率,用户可通过AVP功能节省时间。
中速(80km/h)的Robotaxi,目前众多自动驾驶算法公司(包括Waymo、百度、Cruise等公司)都是采用工控机、车载服务器作为控制器,算力可以达到上千Tops,以及机械式激光雷达,而车规级的嵌入式域控制器(100~300Tops)预计在2021年中或者2022年中量产,固态、半固态激光雷达预计在2022~2023年量产,届时才具备中速Robotaxi量产条件。
普华永道指出,L4 Robotaxi是无人驾驶最大的细分赛道之一,作为一种对传统网约车运力的补充和提升,可以增加整体商业模式的长期利润。由于过高的技术门槛,该商业模式会首先在美国落地,在中国和欧洲的落地时间预计会稍晚1~2年。
至于Robotruck,其在长途物流运输时,可以将2名司机减少为1名,在短途运输时可以减少单个司机的工作量,为司机个人和货运企业带来显著的成本效益。同时, Robotruck可以通过算法控制最优的油耗性能和安全距离。燃油成本占卡车TCO成本的三到四成,车企实验数据表明,自动驾驶系统可以控制油耗下降5%-10%。其前景也非常可期。
不过,即使是上述商业模式可以形成闭环,也需要3-5年的时间,况且这些模式也不代表L4的完全成熟,对于车企最关心乘用车的L4落地,没有技术和政策的万分齐备,最终按钮就不会被按下,毕竟自动驾驶是关系到人命的大事。
所以,激光雷达的成熟也只不过补上了L4落地的一块拼图。在各方要素都没有凑齐的情况下,L4还只能在活在地理围栏中。(校对/Andrew)




 专利申请
专利申请
 知识产权质押融资
知识产权质押融资
 专利地图分析
专利地图分析
 版权登记
版权登记
 集成电路布图设计
集成电路布图设计
 商标交易
商标交易
 商标申请
商标申请
 专利交易
专利交易
 专利无效
专利无效




热门评论