

【嘉勤点评】鹏行智能发明的新型四足机器人的腿部设计结构方案中,通过将机器人的腿部关节和小腿关节以连杆传动的方式进行实现,可以完成精度、效率都比较高的控制算法。同时,通过三种电机的相互配合,以使得机器人可以在恶劣环境中工作,并可降低机器人制造的成本。
集微网消息,众所周知,足式机器人相对于传统轮式具有较高的地面适应性,但是相比于轮式机器人,其开发难度较大,因此,放眼全国,能够实现足式机器人团队也是凤毛菱角。
在足式机器人的设计中,为了保证行走稳定性,腿部关节一般由三个动力单元组成的三个自由度,组件需要较多零部件,其不仅要求结构设计精密,且需要关节位置准确,导致成本往往很高。因此,如何保证四足机器人精度、稳定性,同时易装配、器件少易加工性能成为设计的关键。
另外,机器人还需要保证外观的美观和耐用,各关节走线布置也极为重要。尤其是在机器人的足底,由于足底中有足底力传感器且足底空间狭小,不仅需要布信号传输线,还需要排布足底力传感器电源线,由此造成布线比较困难,具有比较大的生产难度。
针对上述这些问题,鹏行智能在2020年4月21日申请了一项名为“一种新型四足机器人腿部关节”的发明专利(申请号:202010318910.X),申请人为深圳鹏行智能有限公司。
根据该专利目前公开的相关资料,让我们一起来看看这项技术方案吧。

如上图,为该专利中发明的新型四足机器人腿部关节的结构示意图,该结构中,包括机器人本体上主要安装有:侧摆电机1a、大腿电机2a以及小腿电机3a,这三个电机彼此之间相互连接,在小腿电机的一侧同时连接有大腿外壳4a,其底端转动连接有小腿5a以及足部外壳6a。
而在该结构中,为了让机器人的腿部设计小且用料少,其设计思路为:尽可能保证系统具有足够的精度且传动件足够少,并且要兼顾耐用、传动效率高,另外传动机构运动所占的空间要足够小,这点对于减轻腿部惯量和腿部造型都具有帮助。
在上图中,小腿电机的旋转运动经过传动连杆唯一器件,将力传递并转换成大腿外壳和小腿的相对运动,另外传动连杆具有死角位置,必须进行两个方向的限位,从而防止机器人的运动进入死区。
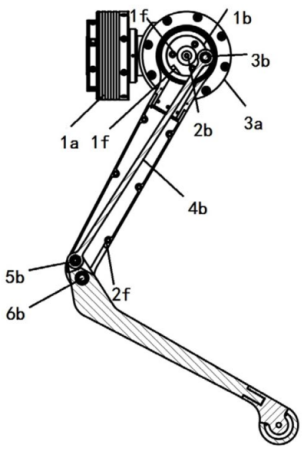
如上图所示,为上述结构的剖视图,第一小腿限位1f和第二小腿限位2f既作为外观件也作为机械支持件。当小腿电机减速后经过法兰盘将力输出到曲柄盘1b上,传动连杆4b和第一轴承2b、第二轴承3b、第三轴承5b、第四轴承6b组成四边形连杆机构,将电机旋转的力以1∶1的比例传递到小腿的关节上。
进而,小腿绕着第四轴承旋转,而第一轴承、第二轴承、第三轴承可以选用低速大承载力滚针轴承,并采用凸轮输出连杆结构设计。这样,通过在机械腿的内部设置轴承和交叉连杆,腿部单元所需空间只有普通的一半。
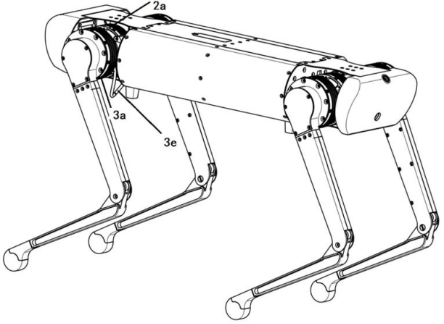
最后,如上图,为搭载有这种腿部关节的机器人本体结构示意图,当侧摆电机绕方向(图1中R3)进行旋转运动时,可以让腿部向身体内部或者外部摆动,以保持平衡和侧方向的运动;而大腿电机的运动会带动大腿外壳与小腿整体做前后运动如图1中R2所示的运动方向;当小腿电机旋转时,可以使得小腿进行如图1中R1方向的运动,从而完成整条腿的运动。
四条腿均如此设计,完成四足机器人的全身运动,如前进后退、侧摆平衡、弹跳、转弯等常规动作,可以很好的适应复杂的地面。其中,大侧摆电机、大腿电机和小腿电机内部具有电流传感器,电流和关节的受力成比例,通过检测内部的电流大小就可以得出关节的受力情况,并可映射出足部外壳的受力情况。通过这些数据信息,就可以使得机器人感知到足底的软硬、高低等路况信息,并把这些信息告知中央处理器以进行综合控制。
以上就是鹏行智能发明的新型四足机器人的腿部设计结构,该方案中通过将机器人的腿部关节和小腿关节以连杆传动的方式进行实现,可以完成精度、效率都比较高的机器人控制。同时,通过三种电机的相互配合,以使得机器人可以在恶劣环境中工作,并可降低机器人制造的成本。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


