近日,同济大学电子与信息工程学院范睿、陈启军教授团队在多模态传感器外参在线标定方向取得重要研究进展。相关成果以“DST-Calib: A Dual-Path, Self-Supervised, Target-Free LiDAR-Camera Extrinsic Calibration Network”为题,发表于机器人领域国际顶级期刊《IEEE Transactions on Robotics》(T-RO)。该论文以同济大学为第一完成单位,第一作者为我院控制科学与工程专业2024级硕士研究生黄知为(导师:范睿),通讯作者为范睿教授。
成果简介
多模态融合感知是自动驾驶及机器人环境感知的核心基础。激光雷达能够提供高精度的三维几何信息,而相机则能够获取丰富的纹理及语义信息。两者的有效融合可显著提升系统对复杂环境的理解能力,为视觉定位、三维目标检测、地图构建及决策规划等任务提供可靠支撑。
然而,多源异构传感器的融合高度依赖精确的外参标定。现有标定方法通常需要专用标定板、离线数据采集或特定场景特征,难以满足真实环境中的长期运行需求。当传感器系统发生位姿变化、机械振动或受到外部干扰时,原有标定参数可能失效,从而影响整个感知系统的稳定性与可靠性。
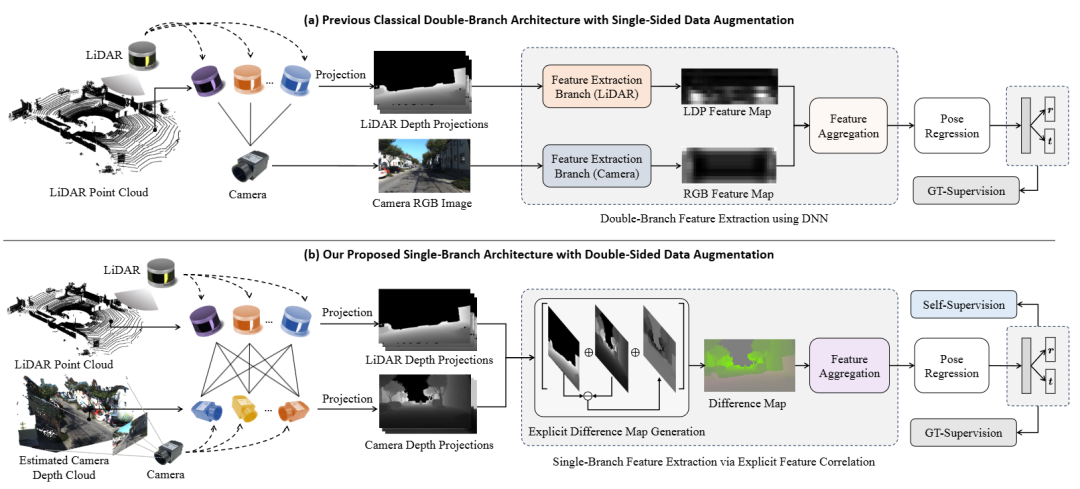
针对上述问题,本文提出了一种无需标定板的在线自监督激光雷达-相机外参标定框架 DST-Calib,可在系统运行过程中持续完成外参估计与自适应校准。研究发现,现有基于深度学习的标定方法普遍采用单边数据增强策略,在跨场景或跨设备应用中易出现泛化能力下降的问题。为此,本文提出双边数据增强方法,利用深度估计生成多视角相机观测,有效提升训练数据的多样性与鲁棒性;同时设计双路径自监督标定框架,在降低高精度标注依赖的同时实现在线标定。此外,本文进一步提出基于差异图的跨模态特征关联机制,通过显式建立激光雷达与相机深度信息的对应关系,构建全新的单分支网络架构,在提升标定精度的同时降低模型复杂度。
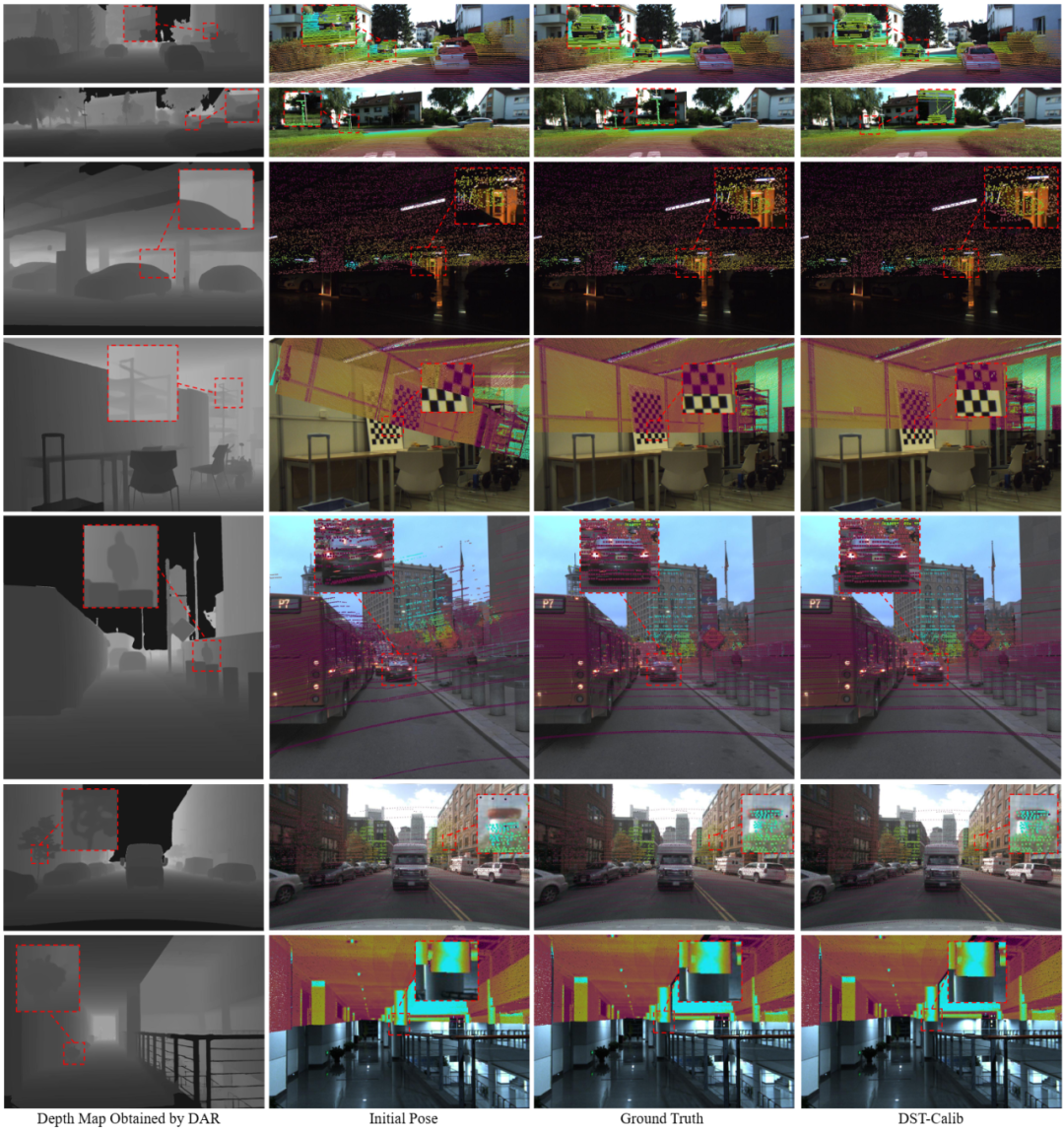
在五个公开基准数据集及自建真实场景数据集上的实验结果表明,DST-Calib在标定精度与泛化能力方面均优于现有先进方法。实验涵盖23种不同的激光雷达-相机配置,仅利用其中三种配置进行训练,即可成功泛化至其余所有配置,展现出卓越的跨设备与跨场景适应能力。