
5月25日,特斯拉美国官网上发布《Transitioningto Tesla Vision》的公告中表示,从2021年5月仅北美地区制造的Model3和ModelY将不配备radar(毫米波雷达),Autopilot将由摄像头和视觉神经网络提供运算支持。
图片来源:特斯拉北美官网
看来钢铁侠并不是单单拒绝Lidar,连Radar也即将被抛弃。
其实早先特斯拉就已经放风,酝酿对目前的FSD(完全自动驾驶)软件进行一次大版本的更新,或将不再需要毫米波雷达而采用纯视觉的感知方案。

图片来源:网络
经证实,特斯拉本次虽然取消了唯一一颗前向77GHz毫米波雷达传感器,但超声波雷达依然存在,所以小编认为这或许并不能称之为“Pure vision”。

图片来源:特斯拉美国和中国官网
但尽管如此,取消毫米波雷达还是引起了一阵不小的骚动,按照通常的理解,自动驾驶采用多传感器融合的方式似乎是公认的。
而且随着激光雷达成本的降低,似乎传感器种类可以“做加法”,但此刻特斯拉却选择了“做减法”,究竟为什么呢?本篇文章小编斗胆分析一下。

图片来源:华为(首台搭载3颗华为激光雷达的极狐阿尔法S样车下线)
先认识一下,毫米波雷达究竟是什么。
➤毫米波雷达,是工作在毫米波波段(MMW,Millimeterwave)探测的雷达。其波长为1~10mm,介于微波和厘米波之间,工作频率在30~300GHz频域。基本工作原理是通过天线
发射信号和接收信号之间的频率差来进行测距、测速,利用天线阵元之间的相位差来进行测角度信息。

图片来源:大陆Continental
毫米波穿透雾、烟、灰尘的抗干扰能力强,具有全天候(大雨天除外)全天时的特点。还能同时识别多个分辨识别很小的目标,具有成像能力,体积小、机动性和隐蔽性好等特点。因此,毫米波雷达在5G通信、雷达、制导、卫星遥感技术、射电天文学和波谱学方面都有广泛的应用,当然我们现在常见的自动驾驶汽车及含有ADAS辅助驾驶功能的汽车也在使用。

图片来源:大陆Continental毫米波雷达
➤车载毫米波雷达
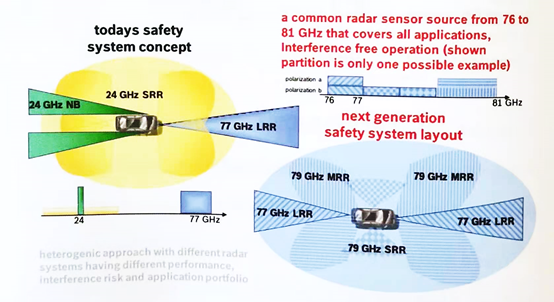
针对汽车领域,目前国际电信联盟划分给车载毫米波雷达的频段为两种:24GHz和77GHz。
而根据探测距离不同分成三种:短距离SRR(60米以内)、中距离MRR(100米左右)和长距离LRR(200米以上)。
通常24GHz雷达检测范围为短距离,未来或逐步被淘汰,而中距离和长距离毫米波雷达都使用77GHz。
图为:毫米波雷达FOV分布(来源:佐思产研《智能驾驶硬件指南》)
车载毫米波雷达根据车身安装部位可实现不同探测功能,短距离探测主要用于如盲点探测、碰撞预警、泊车辅助等,通常在翼子板或车身四角位置。
中远距离探测则通常作为ACC巡航、刹车辅助、紧急刹车、车距保持等功能,通常安装在车辆前部。
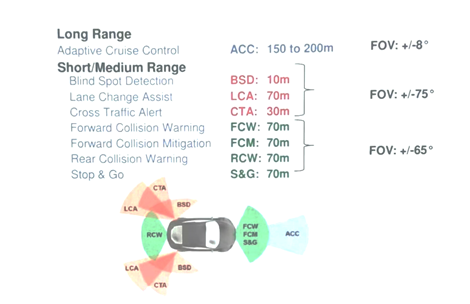
图为:毫米波雷达对应ADAS功能的性能要求(来源:佐思产研《智能驾驶硬件指南》)
如上述所说,毫米波雷达应用如此广泛,那么为什么仍被特斯拉舍弃了?
仔细查阅,小编得知,其实毫米波雷达也有一些缺点和局限性:
第一,对物体的识别度差
因为毫米波雷达主要作用是测距和测速,并不具备准确识别物体的能力,
尤其是对人,一般在10-20米间探测有效率高,20米以上可能会误检、漏检。
同时毫米波雷达受对金属物体探测最为敏感,但也恰恰是因为有时金属过多或位置的问题,由于无法分辨具体物体,所以在涉及到ADAS相关功能时,常常会做出刹车的决策。
举个例子,道路刚维修好时,道路施工方通常会在刚修补好的沥青或水泥的地面铺上一层钢板,防止地面被过往车辆压坏,而超声波雷达走过此条车道时会认为地面上的钢板是一堵墙,出现紧急刹车行为。
第二,对横切向目标的探测准确度低
毫米波雷达发射的电磁波遵循“多普勒效应”,只能提供径向的速度探测,因此毫米波雷达不会提供切向障碍物的速度,使用毫米波雷达对横切向的目标识别准确度低。
第三,容易被电磁干扰
由于很多汽车喜欢安装测速雷达或一些通信天线,其本身也都会发射电磁波,因此使毫米波雷达的误判成为家常便饭。
第四,易受恶劣天气影响
在雨、雾和湿雪等高潮湿环境下,毫米波的衰减会降低雷达的有效探测距离。
第五,性价比
毫米波雷达虽然没有激光雷达贵,但是相比摄像头其成本也相对高。
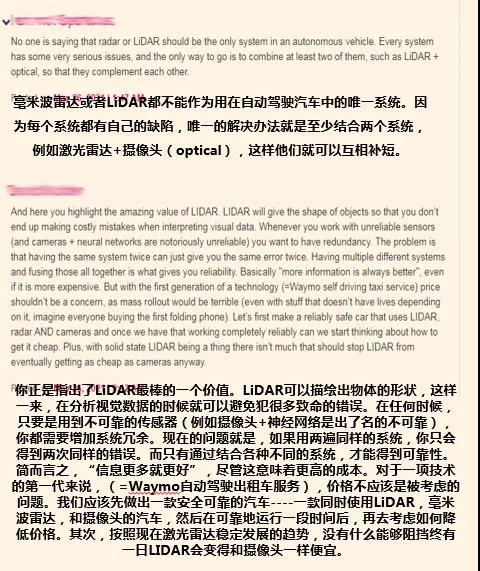
尽管如此,仍有很多行业内的分析认为,毫米波雷达仍然是自动驾驶传感器里非常重要的组成部分,因为单纯依赖摄像头依然有很多顽疾存在。
图片来源:https://www.theverge.com
纯视觉方案被质疑也是很正常的,首先,摄像头是一种被动式传感器,其本身并不发光,成像质量受到环境亮度影响较大,易受外界雨天、雾天环境以及强光下曝光或黑夜环境而影响识别率。
图片来源:https://www.theverge.com
其次,摄像头需要海量数据支撑和标定,所需计算量庞大,需要GPU等更多算力支撑。
另外,在相同的恶劣天气情况下,如大雨天气,虽然毫米波雷达受限,但摄像头也同样会受限。而且摄像头被遮挡时基本上也无法正常工作。
其实,在探测距离方面,毫米波雷达对中远程的探测依然可以在很多功能场景下提供更好的体验,如:AEB(自动紧急制动),因为前向毫米波雷达与摄像头数据融合,可有效感知车外的环境,进行静态、动态的识别,能及时进行预警前方碰撞,如果去掉毫米波雷达可能会缩短汽车的制动距离,从而降低舒适度。

图片来源:网络
相信特斯拉也对去掉毫米波雷达持谨慎态度,只选择了北美发售的两款车型而未将全球车型进行调整,
另外也限制了部分自动驾驶功能,比如智能召唤和紧急车道偏离回避就在交付时被禁用,同时,也增加了跟车距离并进行了限速,
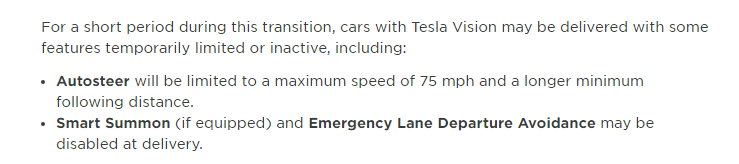
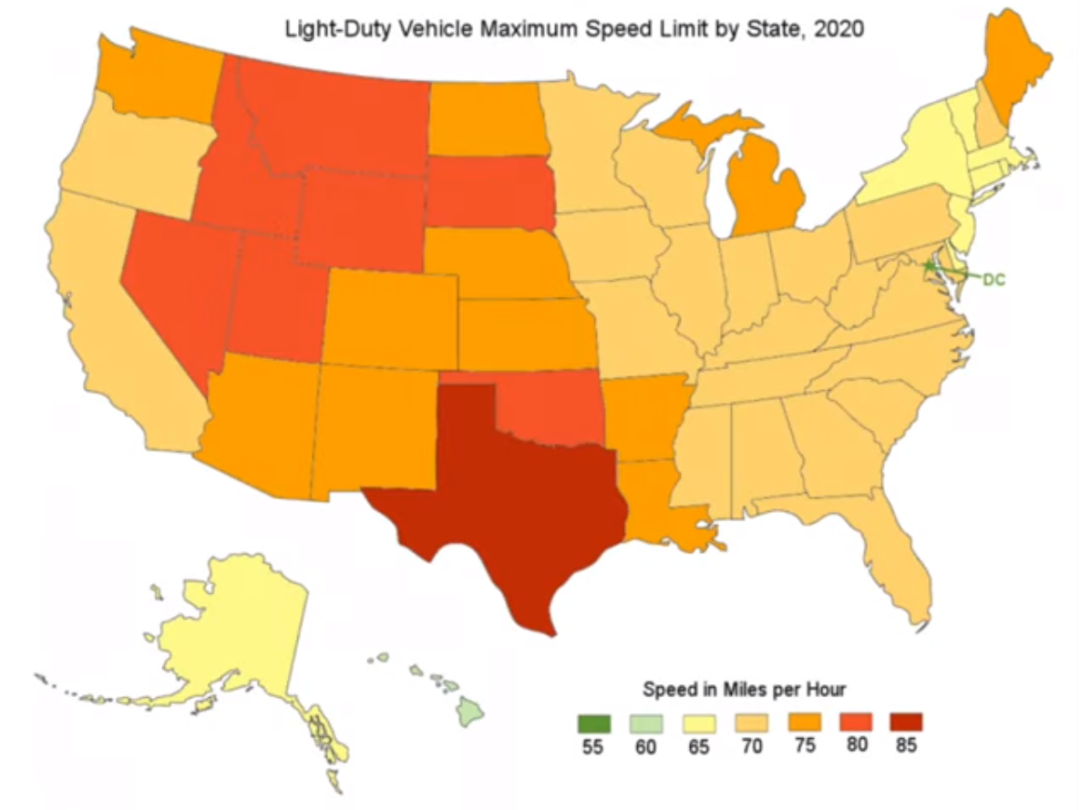
具体速度限定为75英里/小时以内,或许这对北美的部分州不太友好,因为定速在80英里/小时开启自动驾驶在美国人烟稀少的州是很常见的。
图片来源:网络
不管怎样,毫米波雷达确实已经被特斯拉尝试舍弃了,但这也不能代表未来的趋势,还是有相当多的人认为多传感器的组合更加安全和值得信任,这里面也提到了地图。
图片来源:https://www.theverge.com
作为四维图新来说,我们认为高精度地图也是自动驾驶必不可少的传感器,可有效弥补自动驾驶传感器的性能边界,为自动驾驶提供重要的先验信息。
而且高精度地图可以帮助自动驾驶车辆准确定义自身在环境中的位置,并在感知、规划、决策等模块起到重要支撑作用。





