柔性微型机器人在体积、重量上都远小于传统的刚性机器人,可以胜任诸如狭小地形探测、灾害救援等很多大型机器人难以完成的工作。但是在触觉感知能力上,微型机器人由于带负载能力弱、尺寸小,其通常无法直接搭载商用传感器和应用传统感知解决方案来获得感知能力,必须通过与微型机器人的结构与功能相匹配的特殊设计,定制微型机器人的传感器。因此如何在微型机器人驱动力弱、功率密度低、结构尺寸小的限制下实现机器人对外界环境的触觉感知,对赋予微型机器人实用化和智能化具有重要意义。
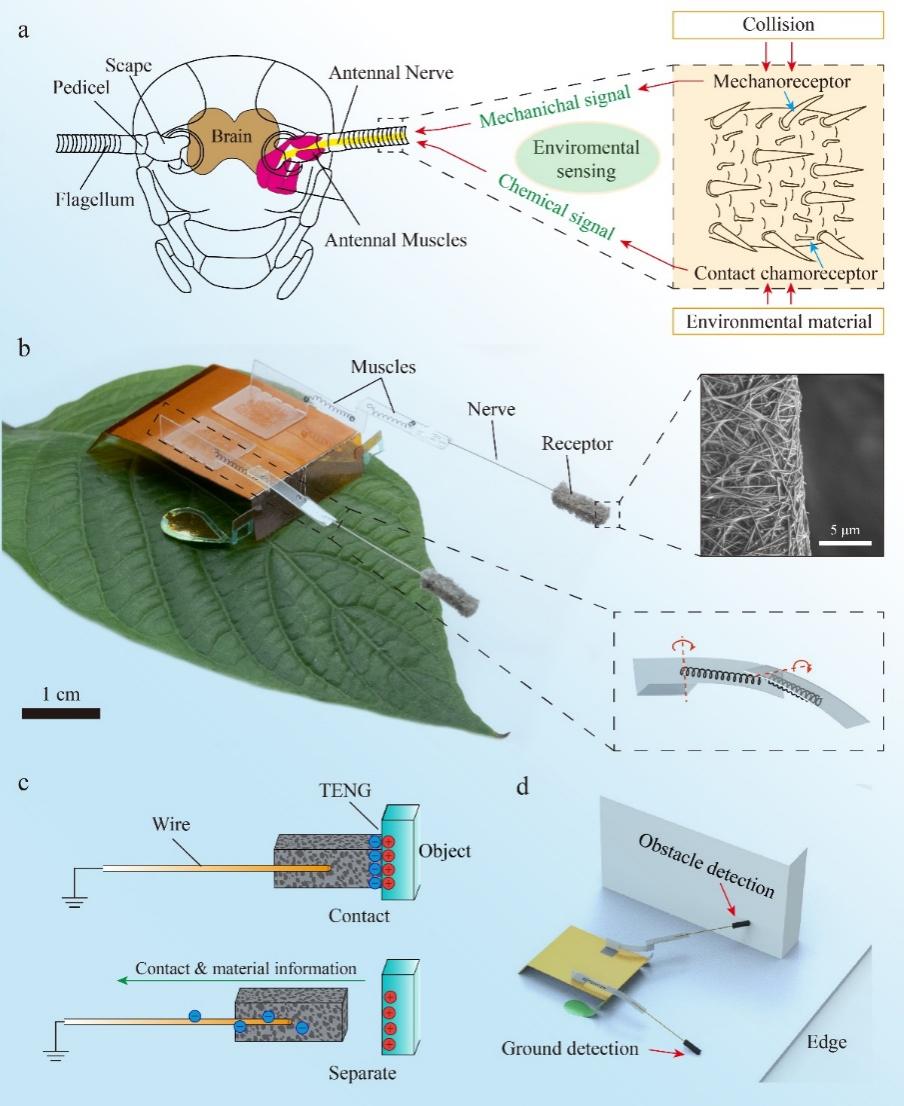
图1.(a)昆虫触角系统的解剖示意图;(b)安装仿生触角的微型机器人;(c)仿生触角感受器的传感原理;(d)仿生触角在机器人主动感知中的应用示意图
近日,清华大学深圳国际研究院张旻、王晓浩团队受自然界中昆虫触角的启发,提出了一种基于摩擦纳米发电机(TENG)的自供电仿生触角传感器(SBA),用于微型机器人的自主环境感知,辅助微型机器人进行障碍躲避和地形预判。该仿生触角主要由感受器、硬质导线和执行器单元三个部分组成,分别模拟了昆虫触角中的机械/接触化学感受器、神经纤维和肌肉纤维(图1),完成接触感知、信号传导和驱动工作。
仿生触角感受器由银纳米线包覆的多孔弹性体(ACES)为原材料制成,文中探究了ACES的制备工艺、导体性能和摩擦电性能。当感受器部分与外界环境中的物体进行接触时,与外界物体之间形成单电极式摩擦纳米发电机进行信号输出,反映感受器与外界环境的接触状态以及接触物的材料属性。执行器单元由聚对苯二甲酸乙二醇酯(PET)薄膜骨架和形状记忆合金(SMA)弹簧构成,赋予仿生触角水平方向和竖直方向的运动自由度,使得感受器部分可以进行自主检测动作,实现主动感知。单个仿生触角的重量约为70mg,并在体积和集成性上与微型机器人相匹配。
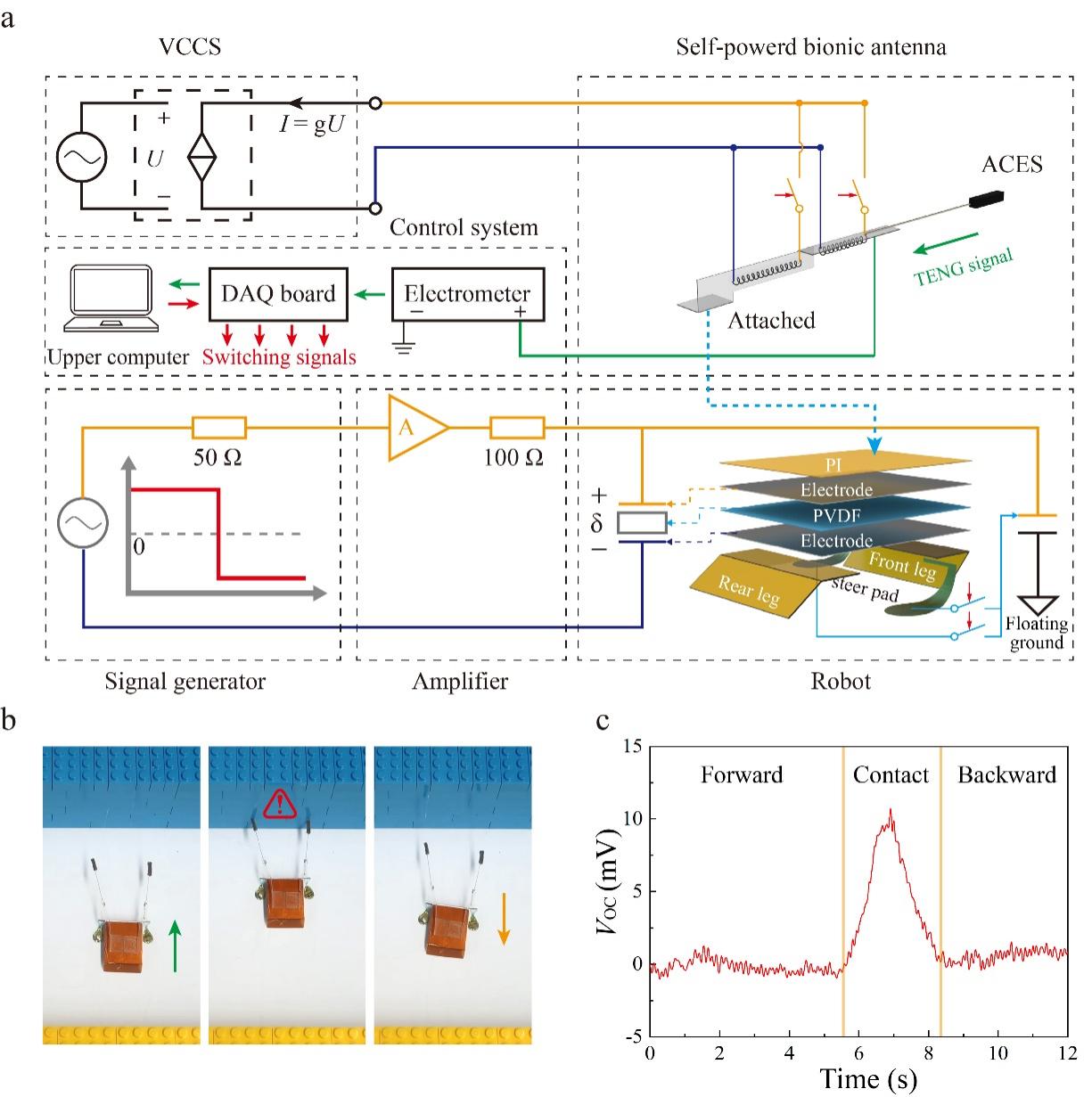
图2.基于仿生触角的微型机器人感知系统
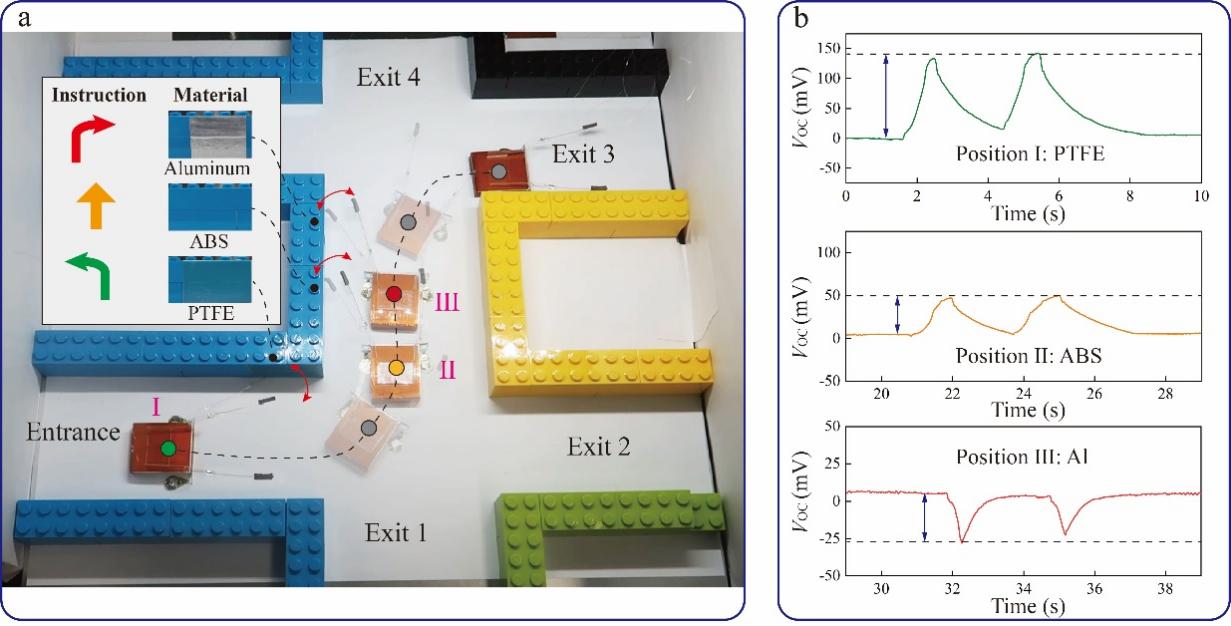
图3.(a)仿生触角在水平面上的主动感知(在避障过程中,机器人通过读取墙壁上预设的材料指令完成预设路线的行进);(b)不同接触材料对应的开路电压信号
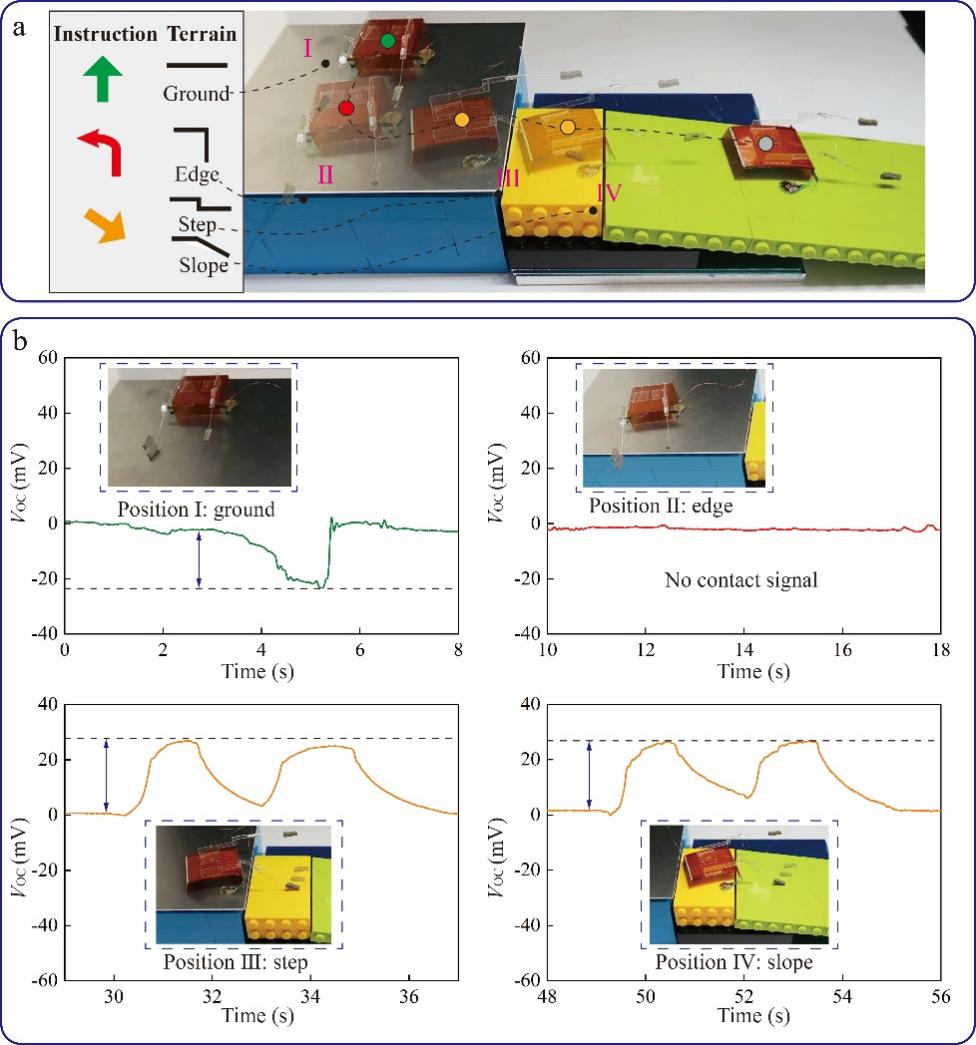
图4.(a)仿生触角在竖直面上的主动感知;(b)不同地形对应的开路电压信号输出
研究团队进一步设计了基于仿生触角的微型机器人感知系统(图2)。通过仿生触角的水平扫掠运动,微型机器人能够主动收集墙壁上预先设置的“材料指令”,使机器人按照预先设定的路线移动(图3)。通过仿生触角的垂直摆动动作,感受器能够区分平面、边缘和斜坡/台阶地形,使微型机器人具有判断地形通过性的能力,保证微型机器人在复杂地形行驶的安全性(图4)。
相关成果以“用于微型机器人触觉感知的摩擦纳米发电机自供电仿生触角”(Self-Powered Bionic Antenna Based on Triboelectric Nanogenerator for Micro-Robotic Tactile Sensing)为题发表于《纳米·能源》(Nano Energy)上。论文通讯作者为清华大学深圳国际研究生院张旻副研究员,第一作者为清华大学深圳国际研究生院2020级硕士研究生朱德宽。