
智能驾驶的每次出行都像是开启一场未知的丛林探险之旅。在“险象环生”的城市雨林之中有着风格迥异的两大探险技术流派,一个是主打车辆智能化的单车智能派,另一个是主打网联化的车路协同派。前者坚持单打独斗,力图依靠车辆自身的软硬件智能化水平实现智能驾驶,需要不断提高算力水平;后者主张并肩战斗,认为车辆和道路基础设施之间应相互协同,方能走得更快更稳。
资料来源:德勤分析
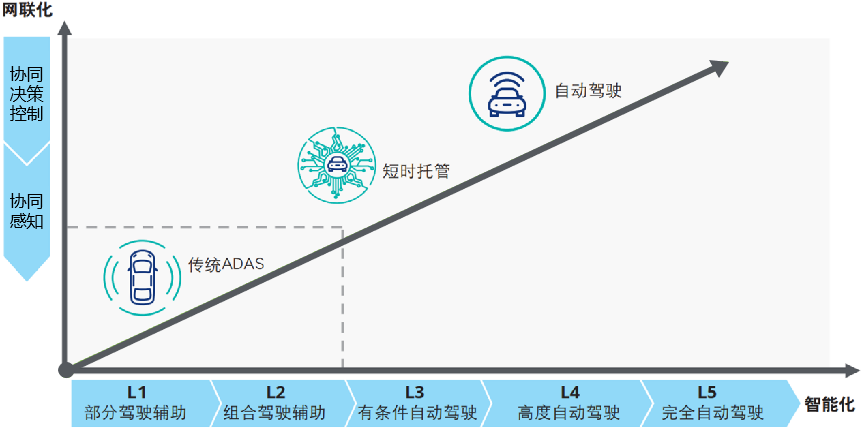
智能化的单车智能派
独行快,众行远,单车智能在科技巨头的加持下率先发展起来,在汽车智能化的道路上一路狂奔,具有受环境制约小、对网络连接要求低等优势,对于车企而言不但可控程度高,还可以凸显整车的智能化优势。随着智能驾驶等级的不断提高,对车载环境感知和数据处理能力的需求变得更高,单车硬件成本也随之水涨船高,单车智能赛道上的比拼开始愈演愈烈。
单车智能的技术路线,让车变得越来越聪明。智能诚可贵,但毕竟势单力薄,一辆车就像是一座数据孤岛,存在着感知局限性。无论是雷达系还是视觉系,都是基于生物感官原理来做出信息判断,搭载在车端必然会有盲区,即使芯片再智能也很难计算看不见的信息。
安全是智能驾驶首要解决的关键课题。现阶段,单车智能受车载传感器安装位置、视野范围、位置精度等方面的限制,车辆在恶劣天气、繁忙路口、“鬼探头”等多种情况下,仍然存在特定场景应对能力不足和失效的风险。
网联化的车路协同派
车路协同曾一度因得不到巨头们的青睐而被“雪藏”,无奈单车智能由于硬件成本过高、经济性与安全性无法兼顾等因素,没能实现快速商业化落地,车路协同再度回归大众视野,给智能驾驶落地提供了另外一种可能。
车路协同跳出车的局限,把目光投向路端,将“聪明的车”与“智慧的路”相结合,让“无形的司机”分身成AB两个,“身份A”在车上站岗,“身份B”在路上放哨,借助路侧多传感器带来的“更优秀的视力”、路侧边缘计算与云端中央计算结合带来的“更聪明的脑力”,实现无死角的超视距感知和“云-管-边-端”的无缝协同,获得比单车智能更安全的无人驾驶体验。
但车路协同也对网络时延、网络安全、传输信道可靠性等提出了更高的技术要求,还受制于道路智能化改造,涉及的交通参与方和技术领域众多,无论哪一个环节出现问题都可能影响智能驾驶的整体体验。
“云-管-边-端”协同示意图

资料来源:车联网解决方案白皮书
单车智能与车路协同本质上是技术和成本在车侧和路侧的不同分配,二者优势互补,殊途同归。目前,“聪明的车”智能程度有限,“智慧的路”建成也需要一段时间,未来,两者走向融合或将成为大势所趋。
无论智能驾驶未来何去何从,都为芯片产业提供了更多的机会,除了“车内”传统的MCU控制芯片、智能驾驶芯片、传感交互芯片以外,也对“车外”云芯片、边缘处理芯片、V2X(Vehicle to Everything)车联网通信芯片等提出了需求,能够提供端到端差异化整体芯片解决方案的厂商将迎来新的发展机遇。
对此,奕斯伟计算CTO何宁博士表示:“汽车核心价值正在发生变化,由传统以动力和操控为代表的机械传动系统正在转向以芯片和软件算法为代表的智能化决策系统。智能驾驶的关键是立足信息技术,加速传感器、大数据、通信、人工智能、云计算、边缘计算等技术的融合,借助软硬件系统方案打通车辆与外界环境之间的信息壁垒,为半导体产业提供了‘云-管-边-端’的全链条机会。尽管目前智能驾驶还处在发展的初级阶段,但在数字化和万物互联的大趋势下,汽车智能化和网联化将不断深入,汽车芯片市场有望迎来高速发展。”









