近日,武汉光电国家研究中心熊伟教授团队提出了一种新型光驱动晶格软体微型机器人,该研究成果已发表在Nature Communications上。软体微机器人因其小尺寸和柔性驱动特性,在生物医学、仿生学和精密微机械等领域具有广阔应用前景,但现有技术面临挑战。传统微型机器人依赖的水凝胶材料在响应速度和变形能力方面存在不足,运动模式多为预设的周期性形变,难以适应复杂多变的环境,这些问题严重制约了其发展。
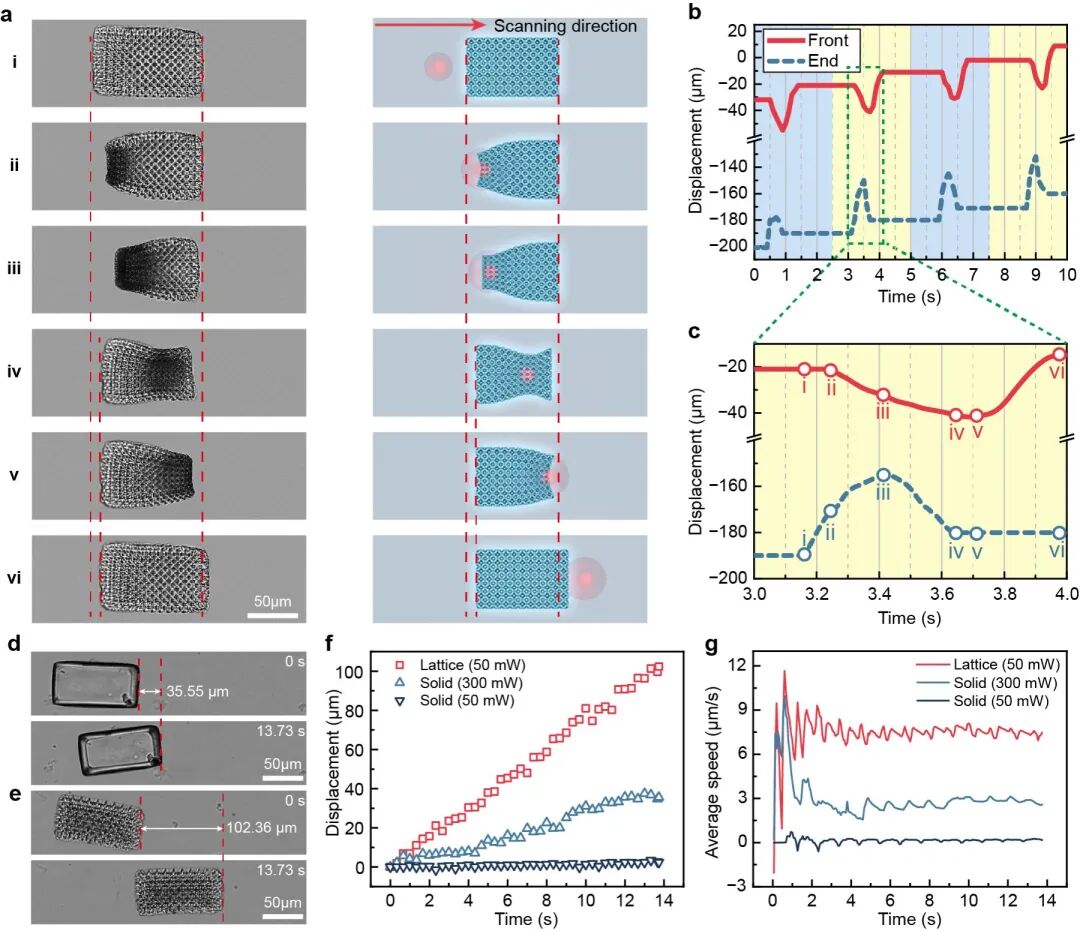
针对上述难题,熊伟教授团队受自然界微生物多样运动方式的启发,结合激光微纳制造与水凝胶材料特性,设计出具备晶格结构的软体微型机器人。研究团队利用飞秒激光微纳增材制造技术,在温度响应型聚合物中引入单壁碳纳米管,构建了截角八面体晶格结构。该设计显著降低了材料密度,增大了比表面积,使机器人在光场调控下能快速产生局部形变,实现蠕动、旋转和跳跃等多模态仿生运动。与传统实心结构相比,该机器人不仅能量利用效率显著提升,运动速度也大幅增加。
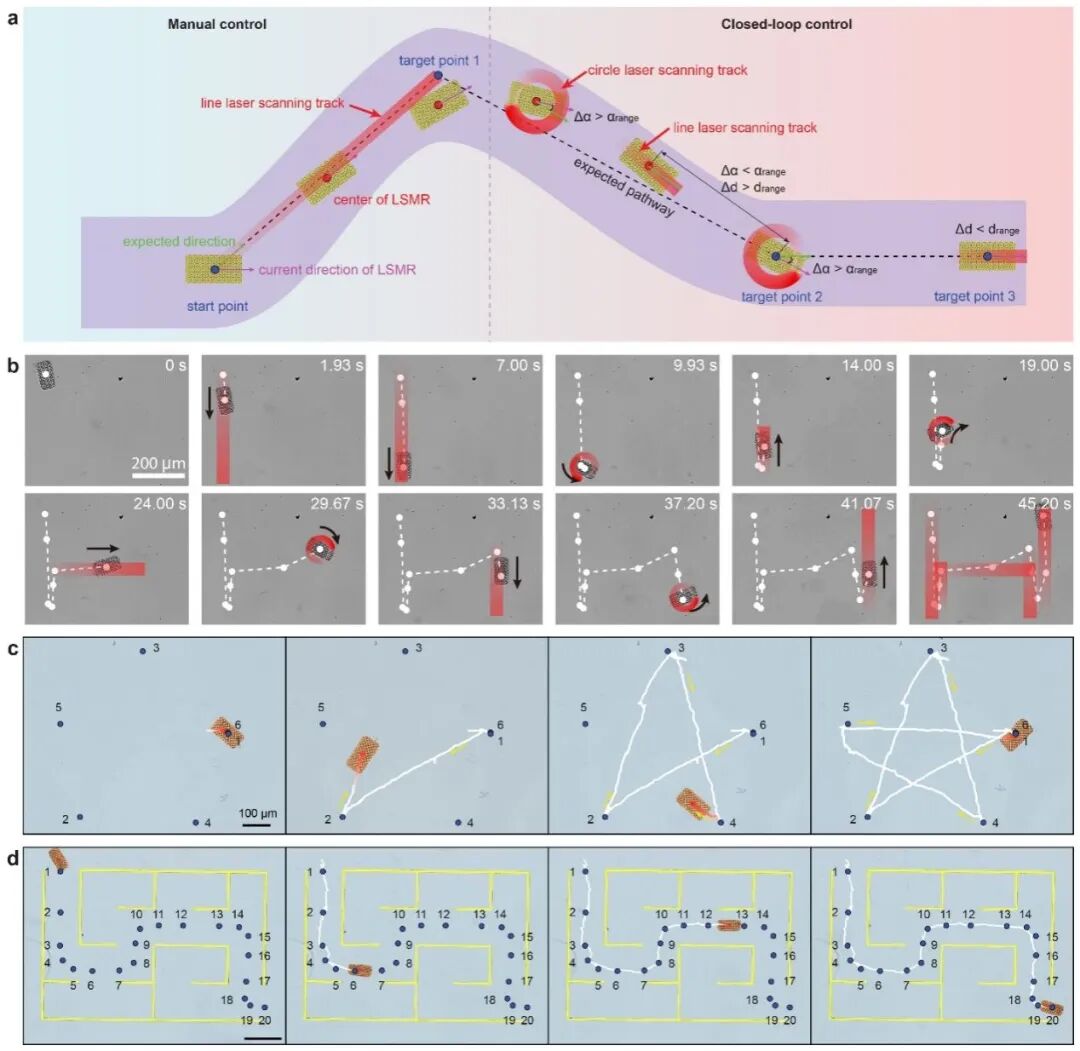
最新进展显示,晶格结构使机器人在相同条件下仅需实心结构六分之一的能量,即可达到三倍的运动速度。具体性能数据包括:旋转速度高达每秒29.38度,比已有报道提升近30倍;在蠕动模式下,速度可达15.15μm/s。研究团队还引入基于计算机视觉的闭环反馈控制系统,使机器人能够实时修正姿态偏差并沿设定路径自主导航。实验中,机器人成功演示了在“星形”和“迷宫”轨迹上的自主运动,显示出精确的可编程控制潜力。该研究由武汉光电国家研究中心博士研究生张铭铎和博士后刘耘呈作为共同第一作者,熊伟教授为通讯作者,并得到了国家重点研发计划、国家自然科学基金、中央高校基本业务费以及光谷实验室创新研究项目的资助。