近日,同济大学电子与信息工程学院印真团队在生物混合微机器人研究方面发表文章,相关研究以 “Biohybrid navigation: Fusing intrinsic motility with external magnetic steering” 为题,发表于Cell姊妹刊《Matter》。该论文以同济大学为第一单位,印真教授为唯一通讯作者。
微型机器人在生物医学领域具有广阔应用前景,可用于靶向药物递送、微创诊断及体内复杂环境探测等。然而,在实际生物环境中,微型机器人往往面临高黏度流体阻力、狭窄通道限制以及复杂几何结构带来的运动不稳定与易滞留等问题,严重制约其运动效率和可控性。
针对上述挑战,Akolpoglu等人围绕复杂生物微环境中微型机器人的稳定推进与精准导航问题,提出了一种融合生物自主运动能力与外部磁场调控的生物混合导航策略。该方法通过将天然具备鞭毛推进能力的微藻与磁性纳米颗粒相结合,在保留其内在生物运动特性的同时,引入外部磁场实现方向引导,从而实现对微型机器人运动轨迹的有效调控。
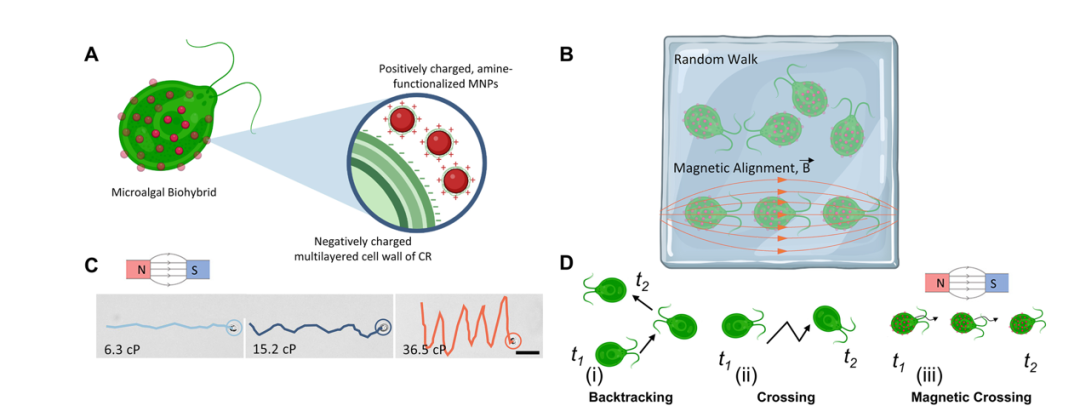
如图所示,构建了一种表面功能化的生物混合微机器人结构模型。微藻细胞表面均匀负载带正电的磁性纳米颗粒,在不破坏其天然鞭毛结构和推进机制的前提下,使其获得对外部磁场的响应能力。该设计实现了生物自主推进与人工磁控单元的有效融合,为后续的精准导航提供了结构基础。
生物混合微机器人在外加磁场作用下,其原本随机游动的运动模式可被有效转变为具有明确方向性的直线或准直线运动。在高黏度流体环境中,尽管整体运动速度有所降低,但在磁场引导下,其运动方向保持稳定,显著减少了反向回退和无效摆动行为。
该研究表明,将生物体长期进化形成的高效运动机制与温和、非侵入式的磁场调控手段相结合,是实现微型机器人复杂环境导航的一种简洁而有效的解决思路。相关成果为生物混合微机器人在靶向治疗、微创医疗及复杂生物微环境探索等领域的应用提供了新的技术支撑。
本研究得到了国家自然科学基金和上海市教育委员会相关项目的支持。