

【嘉勤点评】地平线发明的车辆行车轨迹预测方案,利用车道线参考线与初始预测轨迹加权融合得到车辆行车的最终预测轨迹,不仅提高了辅助驾驶系统的准确性和安全性,也减少了安全隐患发生的几率。
9月3日,地平线宣布已与哪吒汽车开启全面战略合作。双方将依托在各自领域拥有的产业资源优势及科技产权优势,建立长期共赢的战略合作伙伴关系。
地平线的一项重要的技术就是驾驶辅助,驾驶辅助技术作为一项主动安全技术可有效提高车辆行驶时的安全性,而车辆行驶区域的预测在驾驶辅助系统中有着重要的作用。车辆行驶区域预测会影响目标车辆的选取,直接关系着前方碰撞预警系统、自适应巡航控制系统、自动紧急制动系统等驾驶辅助系统的性能表现。
现有的车辆行驶区域预测大多是基于车辆的方向盘转角、横摆角速度、车速等底盘信息来预测车辆的行驶轨迹,这种方法所预测的行驶轨迹会随着距离的增加而出现精度明显下降的问题。
同时,由于车辆底盘信息的获取都是基于传感器测量得到,而传感器本身存在测量误差,会导致计算的结果有误差,继而导致预测的行驶轨迹(特别是近距离处)会左右摇摆,出现预测的行驶轨迹不稳的情况。
为解决上述问题,地平线在2021年5月8日申请了一项名为“行车轨迹预测方法、装置、电子设备及存储介质”的发明专利(申请号:202110502033.6),申请人为地平线(上海)人工智能技术有限公司。
根据目前该专利公开的相关资料,让我们一起来看看这项技术方案吧。
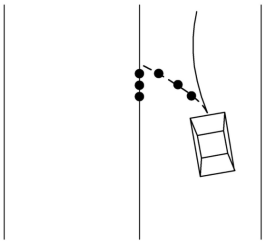
如上图,为该专利中发明的行车轨迹预测系统的应用场景示意图,该方案可以通过摄像头来获取车道线的参考线图像并从中提取参考线,如上图中竖直的直线。同时,根据车辆当前的运动状态,例如结合当前的车速、加速度以及方向盘的弯转角度来得到车辆的初始预测轨迹,如上图中虚线所展示的运动轨迹。
而为了得到车辆行驶轨迹的最终预测结果,还需要对获取到的车道线参考线和初始预测的轨迹进行加权融合。这是由于车辆在行驶过程中不会严格按照车道线行驶,若以车道线参考线预测的行车轨迹会不够平滑,车辆可能会出现较大抖动。
因此,将车道线参考线与初始预测轨迹进行融合,可以综合车道线参考线与初始预测轨迹的优势,从而提高车辆行车轨迹的最终预测轨迹各个位置处的准确性。对于真实的驾驶环境而言,可以更为准确的预测出将来的行车轨迹,为辅助驾驶系统提供判断基础,以此提高辅助驾驶系统的准确性,进而减少安全隐患发生的几率。
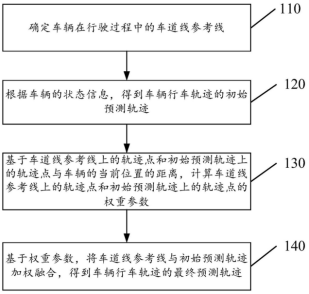
如上图,为这种行车轨迹预测方法的流程示意图,该流程包含以下步骤:首先,需要确定车辆在行驶过程中的车道线参考线,该车道线为实际路况中的车道线分布位置;其次,根据车辆在当前车道内的偏置量、车道线参考线在车辆处与车速方向的夹角、车辆行驶轨迹的曲率、曲率的变化率等参数,得到该车辆行车轨迹的初始预测轨迹,即通过车辆运行中的瞬时状态来预测其将来的行车轨迹,以得到基于瞬时状态的平滑的初始预测轨迹。
最后,基于车道线参考线上的轨迹点和初始预测轨迹上的轨迹点与车辆的当前位置的距离,分别计算车道线参考线上的轨迹点和初始预测轨迹上的轨迹点的权重参数。并基于权重参数,将车道线参考线与初始预测轨迹加权融合,得到车辆行车轨迹的最终预测轨迹。
以上就是地平线发明的车辆行车轨迹预测方法,该方案利用车道线参考线与初始预测轨迹加权融合得到车辆行车轨迹的最终预测轨迹,以综合车道线参考线与初始预测轨迹各自的优势,不仅提高了辅助驾驶系统的准确性和安全性,也减少了安全隐患发生的几率。

关于嘉勤
深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)


